

A Micro Aerial Vehicle to Fight Terrorism

The client, Mechanical and Aerospace Design Laboratory, has requested the design of a micro aerial vehicle (MAV) for reconnaissance missions such as close-range target surveillance in confined spaces without being detected, useful for combating terrorism. Current MAV drones on the market possess fixed in-flight body profiles and must sacrifice their maneuverability or endurance to attain MAV sizes for stealth. The few drones that can provide high maneuverability and endurance at MAV sizes such as the Black Hornet cost >$90,000, limiting their application in high-risk missions. To address these issues, the design team has developed a low-cost drone that morphs into different aerodynamic profiles to optimize the MAV’s maneuverability, stealth, endurance, and disposability in reconnaissance missions.
Design Requirements
The key objectives for this MAV include:
Demonstrating a flight range beyond 5 km to ensure operator safety when calling a targeted air strike
A flight time greater than 20 minutes to compete with military MAVs
Maximum flight speed greater than 14 m/s to track vehicles
Noise levels below 30 dB to avoid audio detection
A maximum cross-sectional area of 555 cm2 to avoid visual detection by targets
Total weight less than 100 g for optimal portability
Cost less than $1,000 to ensure disposability
The constraints in the design were as such:
Must have a mechanical power of less than 10W by minimizing drag
Must be limited to operations at altitudes below 30 m to avoid radar detection.
Final Design
The final MAV design features a quadcopter formation, powered by 4 brushless DC motors that independently control each propeller. The morphing system utilizes one servo motor to alter all propeller arm positions, enabling two configurations: X configuration, to facilitate travel to the target, and O-configuration, to increase stealth in close proximity. Longer arms in the X- configuration enable improved maneuverability through higher torque and angular acceleration, while folded arms in the O-configuration enable access to remote passages and lower visibility. Noise levels are further reduced to improve stealth by optimizing the propeller blade tips. Each design component has been selected to ensure minimal size and weight while maintaining market-leading flight endurance.

Top View of MAV

Side View of MAV

Isometric View of MAV
How Does it Work?
The system will be described firstly with the electrical system (mainly affects flight range, flight time, flight speed, height level, and cost), then the propulsion system (mainly affects the power consumption and noise levels), and finally with the mechanical system (mainly affects the size and mass).
1. Electrical System

Circuit Diagram
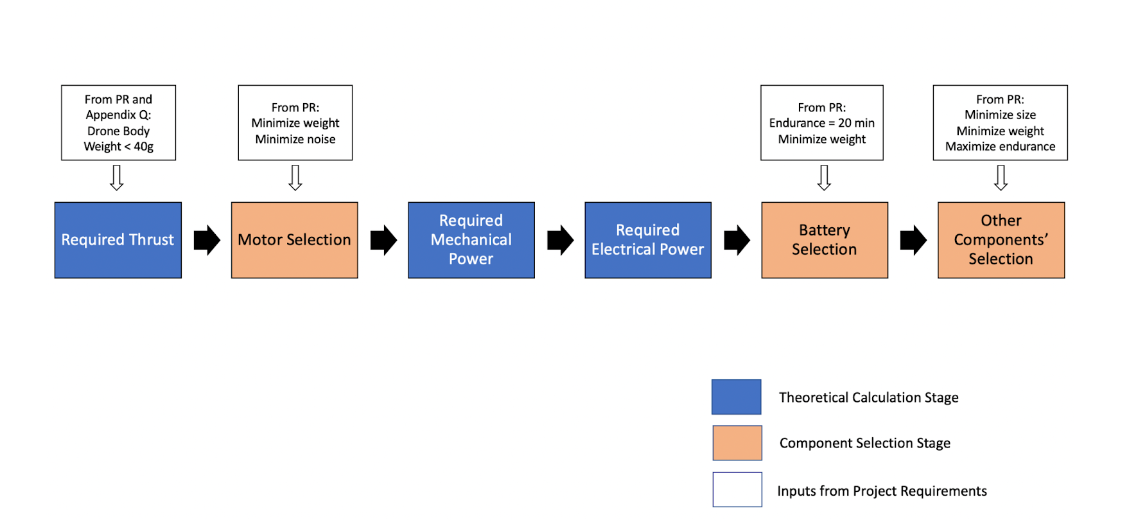
Selection Approach for Electrical Components
(i) Motor Selection
To determine the minimum thrust required for the drone’s propulsion, a free-body diagram for the drone’s forward flight was analyzed using MATLAB. The non-battery-related drone weight for this free-body diagram was assumed to be 40 g based on the project requirements. This enabled the calculation of each motor's required thrust to balance the drone in the roll or pitch axis while generating horizontal movement.
Following the thrust calculation, the mechanical power required to enable stable forward flight and to overcome drag forces to attain the desired speed was calculated to be 27.35 W. Standard motor and propeller efficiencies were then benchmarked to determine the electrical power drawn by the motor to generate the required mechanical power. Motors meeting the thrust and power specifications were compared based on their weight, KV ratings, and voltage ratings to minimize drone weight, the noise emitted, and battery weight. Based on this assessment, the GEPRC SPEEDX2 0803 Brushless Motor 11000KV was determined to be the optimal motor. This motor had a manufacturer’s recommendation for a 1.6-inch diameter propeller.
The table contains a summary of the required specifications and actual specifications of the selected motor.

(ii) Battery Selection
Lithium polymer batteries were selected for the drone because of their high charge density, ability to handle greater forces and reduced scope for leakages. These features would enable the optimization of drone endurance and safety with the three most important specifications being the discharge rate to facilitate power requirements, total energy capacity, and weight/size.
Based on the motor requirements, 3.7-7.4V batteries were benchmarked to assess their current ratings to evaluate the batteries’ power supply capabilities. It was noted that the highest charge-carrying batteries present on the market led to disproportionately higher drone size and weight compared to hover time. The design team, therefore, decided to opt for custom-built batteries to optimize drone size and hover time, which can be supported by several battery manufacturers.
The battery with the highest charge density in mAh/g amongst the shortlisted batteries from the market was benchmarked. MATLAB was then used to evaluate the endurance for different battery capacities and weights assuming the same energy-to-weight density to determine the requirements of the custom-built battery. The results have been plotted in the figures below and show that the 20-minute endurance objective can be achieved with a 1250 mAh battery capacity and 30 g battery weight.

Battery Capacity vs Endurance and Thrust Per Motor

Drone Weight vs Forward Velocity and Current Drawn
(iii) Electronic Hardware Selection
Lithium polymer batteries were selected for the drone because of their high charge density, ability to handle greater forces and reduced scope for leakages. These features would enable the optimization of drone endurance and safety with the three most important specifications being the discharge rate to facilitate power requirements, total energy capacity, and weight/size.

2. Propulsion System
The following section will describe the propulsion system which contains two aspects: one, the propeller design which meets the thrust requirements to lift off, hover and accelerate while ensuring power constraints are met, and the second is to focus on the noise reduction method of the propulsion system to meet the noise level constraint.
(i) Propeller Design for Power
A 3-bladed NACA 2412 propeller with a 40 mm diameter was selected for the design. The propeller has been shown below as well its feature specifications have also been given in a table.

Top View of Propeller

Front View of Propeller

Isometric View of Propeller

Blade Element Momentum Theory was used to obtain propeller parameters for design, with the complete design process shown in the figure below.

To design the propeller, the highest lift-to-drag ratios of 4-digit NACA profile shapes at Reynolds numbers corresponding to MAVs’ typical velocities were compared. The NACA2412 profile had the highest lift-to-drag ratio of 32.5 at an angle of attack of 7.25° and a Reynolds number of 50,000, making it the optimal choice for the propeller blade. The graphs for the characteristic section shape, lift coefficient vs drag coefficient, lift coefficient vs angle of attack, drag coefficient vs angle of attack, and lift-to-drag ratio vs angle of attack have been provided in the figures below.

NACA 2412 Airfoil Profile

Cl vs Cd, Cl vs a, Cd vs a, Cl/Cd vs a for NACA2412
After this, the pitch angle distribution and chord length distribution were calculated for maximum efficiency with their corresponding graphs shown below.

Pitch Angle Distribution Along Radial Length

Variation of thrust with RPM for different blade counts

0.2058 N thrust at 39,400 RPM

Noise contours observed for optimized blade tips; max noise at blade tip of 74.8 dB

Limitation of movement in O-configuration
Deflection analysis of propeller arm

Chord Length Distribution Along Radial Length
To determine the optimal blade configuration (2, 3, or 4 blades) for 40 mm propellers, the variations of thrust and power with RPM for different blade counts were plotted in the figures below using the BEMT theory. The graphs indicated that a 3-blade propeller yields a 14.3% higher thrust performance than a 2-blade propeller. A four-blade propeller showed a further 7.9% increase in performance but also resulted in higher power consumption, which would limit endurance. 3 blade systems were determined to be optimal consequently.
Deflection analysis of X-linkage

Variation of power with RPM for different blade counts
The graphs also indicate that the maximum thrust-to-weight ratio for a three-blade propeller at 2.5 W power is 1.14 at 35,100 rpm, which is sufficient for the drone to both take-off and have a stable vertical acceleration of 1.37 m/s2 at that power.
Thus, a 40 mm diameter 3-blade propeller was selected from the BEMT theory analysis. According to the theory, the thrust per propeller to lift MAV was 0.1913 N, which was achieved at 34,140 RPM using a power of 2.31 W.
The CFD simulation replicated the BEMT theory conditions. RPM values were iterated with a step size of 0.1s and over 50 steps to achieve the desired thrust while ensuring power consumption remained within the allowed range. The simulation results showed that the thrust and power targets were met at an RPM of 39,400. Thrust was directly obtained from the ANSYS graph, while power was calculated by multiplying the known RPM (in rad/s) with the torque value obtained from the ANSYS graph. The graphs and summary of the results are presented below.
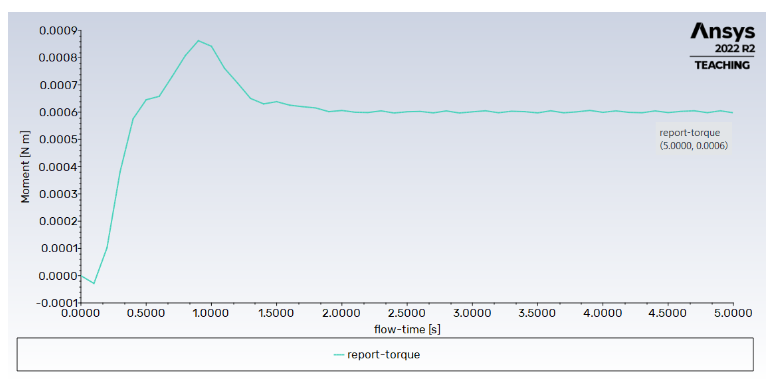
0.0006 Nm torque at 39,400 RPM
The power is the product of the torque obtained from the graph above and the RPM in rad/s, which leads to the power resulting equal to 0.0006*39400*260=2.47 W.
When compared with the theoretical results using BEM theory, the simulation results were reasonably accurate, further proving the design efficacy.

Thus, since there were 4 such propellers in the system, and using ANSYS Fluent Simulation as the final framework, the design achieved a total mechanical power consumption of 2.47 * 4 = 9.88 W, which was under the maximum constraints of 10 W.
(i) Propeller Design for Noise
To meet stealth requirements, the reconnaissance target should perceive noise at levels below 30 dB, which is the noise level of soft whispers and rustling leaves. The target’s position was an important consideration for this and was set at a minimum distance of 5 m from the MAV. This is the furthest it can operate before the camera feed can’t zoom in more to properly identify the individual.
Several methods were considered to optimize propeller noise levels. The propeller blade tips were ultimately modified in a manner similar to aircraft winglets to reduce tip noise levels without causing a corresponding increase in MAV weight, thrust, and power requirements. The final propeller blade tip specifications have been shown below.

Top View of Final Propeller Design

Top View of Optimized Blade Tip Design
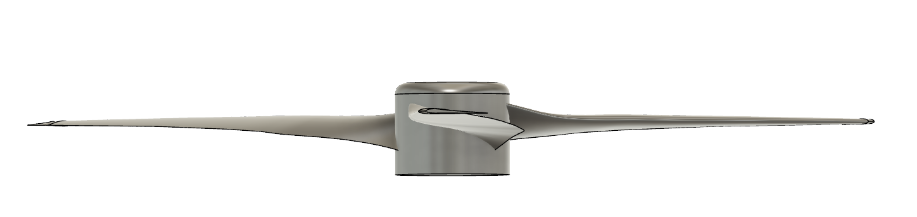
Front View of Final Propeller Design
Because the previous design was tested on ANSYS and resulted in a 31.9 dB noise level perceived at a distance of 5m away, it was greater than the acceptable noise of 30 dB, thus it resulted in the approach to optimize the tips. The design and analysis method for blade tip optimization is detailed below.

It is to be noted due to the optimization, the noise at the blade tip has been reduced by 4.9 dB (compared to the previous propeller design for power). The average noise generated from the rotating region was observed to be 37.4 dB, which was 2.5 dB lower than before as shown in the figures below. Since the propulsion system consists of 4 propellers, the total noise emitted in this design would be 43.4 dB. At a distance of 5 m from the MAV, the target would perceive a noise level of 29.4 dB, which is below 30 dB, hence meeting the objective.

Noise contours observed for the rotating region with optimized blade tips; average noise level of 37.4 dB
3. Mechanical System
The MAV’s mechanical design comprises 3 layers: the top layer, which houses the hardware electronics used in flight control, the middle layer, which contains the morphing mechanism, and the bottom layer, which holds the landing legs, batteries, and servo motor used for morphing. All fasteners in the design were made of Nylon-6 instead of stainless steel to minimize weight. Nylon-12 was selected for printing non-electronic components due to its high durability, strength, vibration resistance, and ability to create reliable press-fit joints. 3D printing was selected as the initial manufacturing method for two reasons. First, the small drone size would enable low printing times. Second, complex geometries required for compactness could be easily produced at low costs with the technique. However, injection molding would be considered an alternative method to enable higher precision finishes, with faster production times, and lower costs for larger batch sizes.
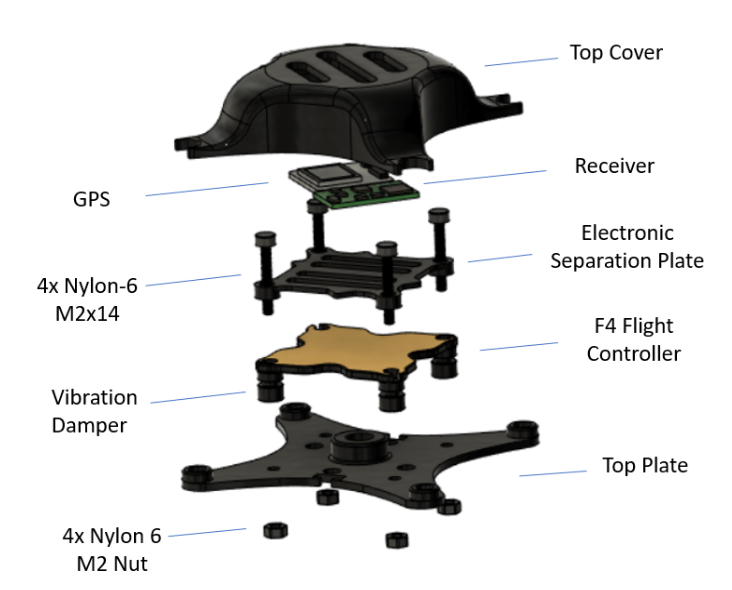
Assembly of the top plate with respective components

Assembly of the top plate with respective components
Mechanical limits were introduced to reliably morph between the X and O configurations by appropriately positioning hex spacers to constrain the movement of the morphing linkage to 28°, as seen in the figures below. This method saves additional weight and reduced complexity compared to adding limit switches.
Limitation of movement in X-configuration
Bottom Layer: The bottom layer of the drone houses the servo motor used to actuate the morphing mechanism. A servo flange is fixed within the X-linkage and enclosed using the bearing support shown below. Three custom-made batteries are placed to fill the negative space in the design. A bottom cover is used to protect the batteries while also facilitating the attachment of the landing legs.

Assembly of the top plate with respective components

Isometric View of Final Propeller Design
Blade tip optimization design and analysis method
Top Layer: The top layer supports the electronics on vibration-damping mounts to isolate sensitive components such as the compass and gyroscope from noise. The flight controller, the receiver, and GPS are separated using a non-conductive plate to allow them to stack without shorting. The electronics are surrounded by a cover to protect them from the environment, with slotted holes to allow for cooling.
Middle Layer: The middle layer supports all the necessary components required for the morphing system. The design goal was to minimize the gap between the top and bottom plates. The minimization was limited by the servo mount and the bolts used to fasten the bearing in the top layer housing and resulting in a height of 6mm. The morphing linkage in this layer is supported on the top and bottom sides by the servo and the bearing, and 4 press-fit pins make contact with the propeller arm slots to facilitate morphing. Four central bolts are used to fasten the two layers together, while hex spacers provide the necessary spacing to fit the components within. The inner surfaces of the top and bottom plates are to be covered with a layer of silicon lubricant to reduce friction as the linkage rotates about their surface.
Assembly of the top plate with respective components
To design the morphing system components, static stress simulations were used to assess the structural integrity of the parts and to identify areas for material removal. A modal analysis was also conducted on the entire system to check the assembly response to vibration frequencies resonating with the propellers’ frequency.
Two critical components experience the largest stress during normal operation - the propeller arms and the central X-linkage.
The propeller arm features a curved slot that fits a 2 mm dowel pin attached to the X-linkage, to drive the opening and closing motion. The arm shape is designed with the same curvature to reduce material. There is a 1 mm high ledge around the slot that provides 3 mm of contact between the dowel and the slot. The rest of the arm is kept at a uniform thickness. One circular end of the arm is limited to the size of the motor diameter, while the opposite end has a smaller diameter to provide enough space to secure the top plate and its washer cover with an M3 bolt. The thickness of the material around the slot and the motor mount is kept to a value of 1.5 mm to minimize weight while maintaining manufacturability.

Assembly of Propeller Arm
The first test conducted on the drone arm was to measure deflection and regions of the highest stress concentration under the worst-case operating conditions. The drone experiences the largest wind load, and consequently greatest motor force to hold it in place in the X configuration. At an average wind speed of 43 km/h and a maximum attainable MAV speed of 17.4 m/s in forward flight, the wind load is 0.14 N / arm while the motor torque is assumed at its maximum value of 0.8 kg-cm. It is important to note that the servo motor selection relied on this same basis, providing the necessary torque to hold the arms in position under the load of the wind while adding a margin of safety to overcome frictional forces to rotate the X-linkage and drive the motor arms.
For the simulation, the boundary conditions were established by fixing the bottom and top plates. A threaded bolt was also used to connect the arm and the top plate. A surface load was then applied along the length of the arm to represent wind load, and the moment induced by the servo motor was set on the X-linkage. The simulation then yielded deflection and maximum stress, which could be used to assess the design’s safety factor.
The maximum resulting displacement of 0.03 mm occurred at the tip of the arm, where the motor resides. This deflection in the horizontal direction is negligible.
The Von Mises stress analysis identified the contact area between the dowel and the slot within the arm to be the area of maximum stress. The maximum stress was determined to be 0.43 MPa, which is also negligible compared to the 60.4 MPa tensile strength of 3D printed Nylon 12, yielding a safety factor of well over a hundred for this type of loading.


Stress analysis of propeller arm
To simulate the drone performance during vertical take-off, a static test was conducted. The boundary conditions for this simulation were fixed top and bottom layers, with M3x5 Nylon 6 threaded bolt connections between the arms and the top layer. An upward force was applied at the center of the motor mount, at the maximum attainable thrust of 77 gf for each motor.
The resulting vertical deflection experienced by the drone arms was 0.22 mm, which equated to the propellers angling in towards the body at 0.36 degrees. The total loss of thrust in the vertical direction due to the deflection was calculated to be 0.008 gf, which is negligible compared to the total thrust generated. This proves that the design is well capable of performing under the induced motor load.

Static thrust simulation of drone
The second important component within the morphing mechanism is the central X-linkage. Its center hub is designed around a servo motor flange that fits the servo motor shaft’s tooth profile with a 1.5 mm thickness around it. A second component is also press-fit on top of the flange to enable bearing connection, given the limited height of the servo flange compared to the space needed to fit the propeller arms between the top and bottom plates. The arms of the X-linkage are 2 mm in width, with a 1 mm cutout to provide clearance for the nuts securing the electronic components to the top plate. At the end of each arm, cylindrical dowels of 2 mm diameter and 7 mm height are press-fit into the respective holes. This enables the contact between the X-linkage and the propeller arms for morphing.

Assembly of X-linkage mechanism
A simulation was conducted to assess the structural integrity of the X-linkage under the torque induced by the servo motor. The boundary conditions for this simulation were set by fixing the top and bottom plates and the propeller arms, and connecting the arms to the top plate with M3x5 Nylon 6-threaded bolt connections. A moment was applied at the center of the linkage with a maximum torque of 0.8 kg*cm.
The maximum resulting deflection of 0.037 mm occurred in the arms in line with the servo flange. This value is extremely small, however, and will have no major impact on the effectiveness of the system. The Von Mises stress is at a maximum at the cut-out locations in the arm, at the region closest to the applied load, and perpendicular to the location of the servo flange. A filleted edge was introduced at the location where the flange height decreases, and the resulting stress concentration decreased significantly to 4.15 MPa. This component is also made of 3D-printed Nylon-12, and the resulting factor was determined to be 14.5. This shows that the dimensions chosen for the linkage are sufficient to withstand the service loads.

Stress analysis of X-linkage
To analyze the natural resonance of the system, a modal analysis was used. The boundary conditions were established for the simulation by fixing the bottom layer while all other components were set as bonded contact joints to determine inter-component interactions in the entire assembly.
From the analysis, the smallest frequency to cause resonance was determined to be 546 Hz. At this frequency, the vibration dampers, made of silicon rubber, would begin to oscillate on two opposite ends, while the remaining structure is essentially unaffected. This could lead to the introduction of substantial noise into sensor readings, which may cause major issues with horizontal stabilization. The largest failure frequency is at a value of 1061 Hz, where the top plate assembly begins to oscillate alongside the propeller arms and main electronic systems.
A research paper was referenced that undertook a study to capture the frequencies of the resulting vibration from balanced and imbalanced propellers, within the same magnitude of the diameter of the selected propellers. For balanced propellers, a frequency of 84 Hz was found, and a slight increase for imbalanced propellers at a value of 96 Hz. Assuming that vibrations are within the same phase, the worst-case scenario was considered, where the total frequency of four propellers can be calculated using the principle of superposition. This states that the vibration at any point in the system is the sum of the individual vibrations from each source. The total frequency of the system is expected to be in the range of 300 Hz to 400 Hz, below the threshold of the system's mode 1 frequency. Thus, this shows that the system will not resonate due to induced frequency from motors while in flight.
A summary of the system's natural frequencies compared to motor thresholds is provided below:

Summary of modal analysis on drone assembly
The following table shows the final mass and cost of the design based on all components present:

Bill of materials for Final Design
Control Scheme
Three tasks need to be executed to control the MAV in flight: balancing the drone in the X configuration, switching between the X and O configuration, and balancing the drone in the O configuration. The open-source flight controller software BetaFlight provides capabilities to complete all three tasks.
For the X configuration, the drone was initially set up with a BetaFlight Mixer Mode of QuadX. BetaFlight could then automatically compute the necessary motor speeds to balance the drone and execute the user’s movement commands.
For switching between configurations, the ‘Aux Channel Forwarding’ option was used in BetaFlight to control the morphing servo motor. The servo motor was assigned to a new auxiliary channel on the receiver, with minimum and maximum limits set on BetaFlight to match the servo positions corresponding to the drone’s X and O morphologies. The rate of positional change was also adjusted on BetaFlight to ensure that the drone switches between morphing configurations in 500 milliseconds to prevent instability.
For the O configuration, BetaFlight’s source code has to be modified to enable the change of Mixer Mode from QuadX to Quad+ during flight.
The same auxiliary channel can then be used from the radio controllers to switch between the O configuration and the X configuration when needed.
Final Results

Evaluation of the Final Design respective to project objectives

Evaluation of the Final Design respective to project constraints
Prototype
A first-attempt prototype design of the drone was developed by the team to illustrate the feasibility of the size and weight objectives, as well as the morphing principle.
The design comprised two sub-assemblies - the top half and the bottom half. The top half housed electronic components including the flight controller and receiver, the X-linkage, the support bearing, and the propeller arms. The bottom half held the servo motor, battery mount, and landing legs.

Bottom (left) and top (right) subassembly of prototype
All frame components were 3D printed using PLA at 30% infill to provide the necessary rigidity, while several cutouts were introduced in the top, bottom, and battery mounting plate geometries to further reduce weight. The drone’s maximum size dimensions matched those determined. However, since an off-the-shelf battery was used, the bottom half of the drone was redesigned to appropriately mount the battery.
The morphing mechanism was achieved through auxiliary channel forwarding of the flight controller’s led-strip pin to repurpose its PWM signal to control the servo position. The upper and lower threshold were tuned using the remote controller to set up two discrete positions, one for the X and O-configuration respectively. The morphing of the prototype drone is seen in the figures below, with propeller tip-to-tip dimensions of 16.6 cm and 11.3 cm:

Prototype drone in X-configuration

Prototype drone in O-configuration
The prototype drone was configured using BetaFlight software with a focus on tuning the drone for self-stabilizing flight mode. In this mode, once the controller sticks are released the drone auto-levels to maintain parallel orientation with the ground.
Several tests were conducted to compare the results of the prototype to those predicted in the design sections. To measure the endurance, the drone was fixed using a string and hovered slightly above the ground while the propellers ran at maximum thrust until the battery was drained. Sound was also measured during this period at a distance of 5 m.

Final Design VS Prototype Performances for each Objective
As seen in table above, there is a noticeable difference in terms of endurance. This is mainly attributable to four factors. The first is a 500 mAh battery was used in the prototype compared to a 1250 mAh battery used in the design. This is due to the size of off-the-shelf batteries, whereas in the proposed design this was addressed by using custom geometries. The discharged voltage range of the prototype’s battery also spanned from 6.2 V to 8.2 V, with the lower limit being significantly lower than the 6.8 V threshold required to spin the motors not enabling full use of the battery's discharge. The total weight of the drone in the prototype was also higher, which led to a greater power draw to maintain a steady altitude. Lastly, the prototype required 4-bladed propellers to support the greater weight and limited current discharge of the battery, which from Appendix W, 4-bladed propellers were seen to have lower efficiency.
In terms of weight, the biggest cause of the deviation is the heavier flight controller used and the body material. The prototype flight controller weighs 6.1 g more than the conceptual design flight controller. The prototype was also made of PLA, being 24% more dense than Nylon-12 which has been selected for the conceptual design.
The higher noise levels of the prototype were due to a combination of several factors. Firstly, the off-the-shelf propellers were unbalanced, with 2 of 4 generating high-pitched noises during rotation. Additionally, the off-the-shelf propeller surfaces weren’t optimized for lower noise levels while also lacking blade tip optimization. Higher rotation speeds were also needed by the propellers to lift the heavier drone, which also raised noise levels. The team attempted to recreate the conceptually designed propeller with additive techniques to address these tradeoffs, however, the rough surface finish and high flexibility resulted in more instability.
With regard to cost, the prototype was slightly less than that of the conceptual design. Although it is important to note that several tradeoffs had to be made when selecting components due to availability and the limited budget of $500 with the inclusion of shipping costs. Components such as the battery, flight controller, receiver, and servo motor deviated from what was selected in section 9.2, to adhere to the budget and arrive in a timely manner which resulted in some compromise in terms of performance and functionality.
Conclusion and Future Works
The project successfully demonstrated the development of a small-scale, low-cost, morphing-based drone that is optimized for high-risk, close-range reconnaissance missions. The drone was designed to optimize endurance, stealth, maneuverability, and disposability, and the final design met all project objectives and constraints. A prototype for the design was built, which demonstrated the feasibility of manufacturing the morphing mechanism, and validated the size and weight objectives.
While the prototype could not validate the noise level objective for this iteration, the team is hopeful that the use of propellers, batteries, and body material specified in the conceptual design, rather than off-the-shelf options, will enable future prototypes to meet the objective.
It should be noted that this design is the first of many iterations to build a robust reconnaissance MAV. Several areas scoped out of the project for the first iteration can serve as future opportunities for further project development. These include the minimization of heat and light dispersion to avoid infrared camera detection, replacement of a discrete morphology-dependent control scheme with a continuous morphology-dependent control scheme for greater stability, development of custom printed circuit boards to reduce drone size and weight to even smaller scales, and implementation of techniques to prevent electromagnetic interference from enemy forces.